Automated three-dimensional warehouse——Reciprocating lifter
Automated three-dimensional warehouse——Reciprocating lifter
Efficient and flexible, cost-effective and easy to implement
Xinje is familiar with various fields of warehousing and logistics and their unique requirements, and has developed targeted software and hardware products to provide customers with efficient and future oriented solutions. With a sustainable development mindset and a commitment to technological innovation, we aim to achieve efficient and flexible material systems, reduce costs and expenses, facilitate implementation, and provide comprehensive solutions for customized combinations. Our goal is to provide you with high-quality technological value for your applications.
Industry background
Traditional warehousing faces challenges such as low space utilization, low operational efficiency, and high labor costs. With the development of technology and the demand for enterprise cargo storage, the intensive warehousing industry is constantly pursuing higher operational efficiency, lower costs, and better environmental sustainability. Through technological innovation and development, the intensive warehousing industry is gradually shifting from traditional warehousing models to intelligent, automated, and sustainable forms.
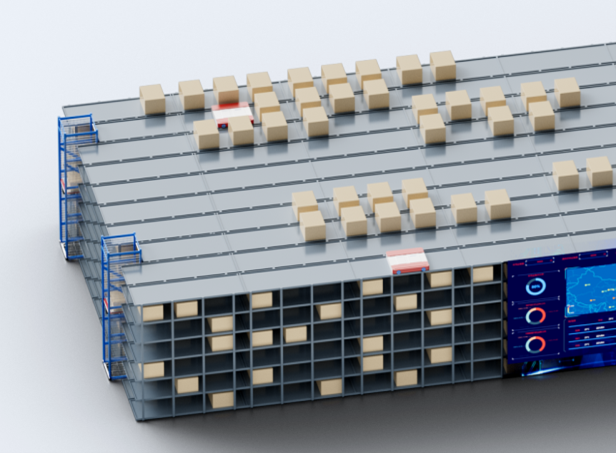
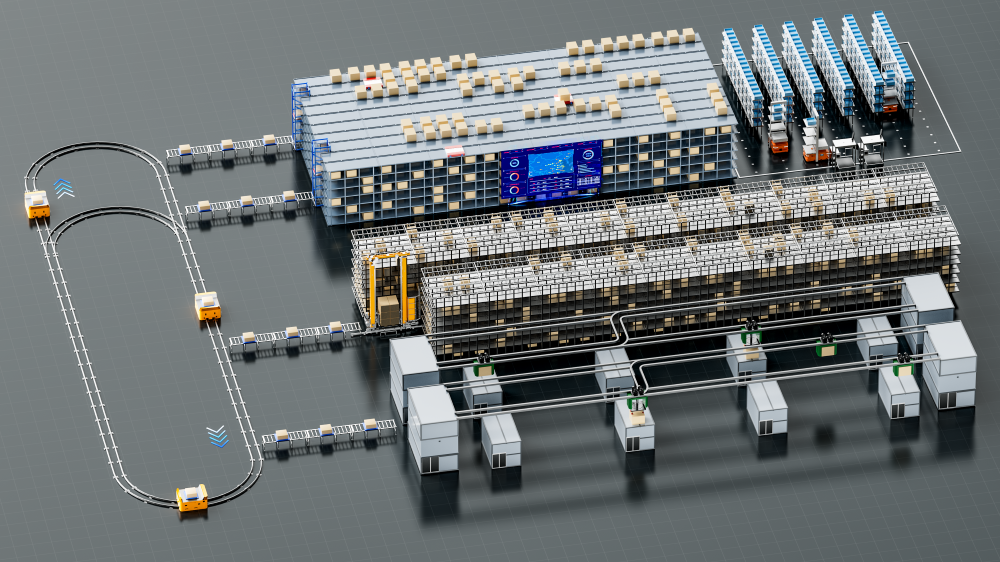
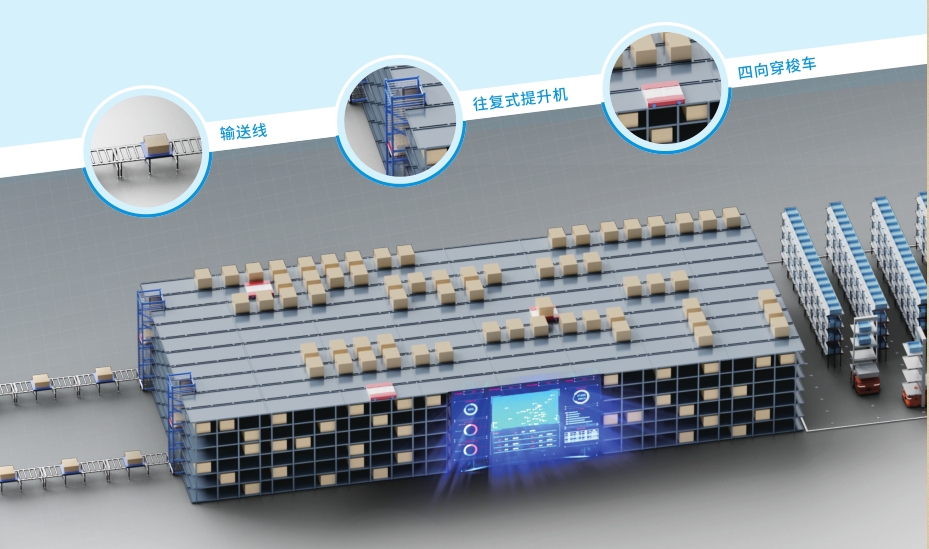
Reciprocating lifter
In the three-dimensional storage, the four-way vehicle collaborative reciprocating lifter completes operational tasks on different levels and in different cargo lanes of the shelves through the travel track. Under the control and scheduling of the warehouse monitoring system, it performs tasks such as loading vehicles, loading goods, connecting conveyor lines, and passing through, enabling the entire dense warehouse to achieve simultaneous operation of multiple layers and vehicles.

Control solution
Adopting the XDQ series motion controller, the two axes/four axes servo lifting cargo platform is controlled by EtherCAT bus (or through EtherCAT controlled variable frequency system), and the gear binding method is used to ensure multi-axis synchronization. Combined with the mechanical structure of the gear rack and the absolute value encoding of the motor, precise positioning of the target layer is achieved, and short-term flexible start stop is also achieved, with no sinking or shaking of the cargo platform. The entire system ensures that the deviation of the four corners of the cargo platform is within 2mm. Through the high responsiveness of the motion control bus, real-time monitoring of lifting speed, cargo platform position, cargo torque, ecological alarm and other parameters is achieved.

 苏公网安备32021102003018号
苏公网安备32021102003018号